Understanding Neurogym Task
![]()
This is a tutorial for understanding Neurogym task structure. Here we will go through 1. Defining a basic OpenAI gym task 2. Defining a basic trial-based neurogym task 3. Adding observation and ground truth in neurogym tasks
Installation
Only needed if running in Google colab. Uncomment to run.
[1]:
# # Install gym
# ! pip install gym
# # Install neurogym
# ! git clone https://github.com/gyyang/neurogym.git
# %cd neurogym/
# ! pip install -e .
OpenAI gym tasks
Neurogym tasks follow basic OpenAI gym tasks format. Each task is defined as a Python class, inheriting from the gym.Env class.
In this section we describe basic structure for an OpenAI gym task.
In the __init__ method, it is necessary to define two attributes, self.observation_space and self.action_space which describe the kind of spaces used by observations (network inputs) and actions (network outputs).
[2]:
import warnings
warnings.filterwarnings("ignore") # to suppress warnings
import numpy as np
import gym
class MyEnv(gym.Env):
def __init__(self):
super().__init__() # Python boilerplate to initialize base class
# A two-dimensional box with minimum and maximum value set by low and high
self.observation_space = gym.spaces.Box(low=0., high=1., shape=(2,))
# A discrete space with 3 possible values (0, 1, 2)
self.action_space = gym.spaces.Discrete(3)
# Instantiate an environment
env = MyEnv()
print('Sample random observation value')
print(env.observation_space.sample())
print('Sample random action value')
print(env.action_space.sample())
Sample random observation value
[0.28708524 0.2543813 ]
Sample random action value
1
Another key method that needs to be defined is the step method, which updates the environment and outputs observations and rewards after receiving the agent’s action.
The step method takes action as inputs, and outputs the agent’s next observation observation, a scalar reward received by the agent reward, a boolean describing whether the environment needs to be reset done, and a dictionary holding any additional information info.
If the environment is described by internal states, the reset method would reset these internal states. This method returns an initial observation observation.
[3]:
class MyEnv(gym.Env):
def __init__(self):
super().__init__() # Python boilerplate to initialize base class
self.observation_space = gym.spaces.Box(low=-10., high=10., shape=(1,))
self.action_space = gym.spaces.Discrete(3)
def step(self, action):
ob = self.observation_space.sample() # random sampling
reward = 1. # reward
done = False # never ending
info = {} # empty dictionary
return ob, reward, done, info
def reset(self):
ob = self.observation_space.sample()
return ob
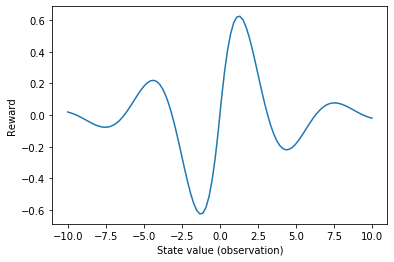
Below we define a simple task where actions move an agent along a one-dimensional line. The reward is determined by the agent’s location on this line.
[4]:
import matplotlib.pyplot as plt
def get_reward(x):
return np.sin(x) * np.exp(-np.abs(x)/3)
xs = np.linspace(-10, 10, 100)
plt.plot(xs, get_reward(xs))
plt.xlabel('State value (observation)')
plt.ylabel('Reward')
[4]:
Text(0, 0.5, 'Reward')
[5]:
class MyEnv(gym.Env):
def __init__(self):
# A one-dimensional box with minimum and maximum value set by low and high
self.observation_space = gym.spaces.Box(low=-10., high=10., shape=(1,))
# A discrete space with 3 possible values (0, 1, 2)
self.action_space = gym.spaces.Discrete(3)
self.state = 0.
def step(self, action):
# Actions 0, 1, 2 correspond to state change of -0.1, 0, +0.1
self.state += (action - 1.) * 0.1
self.state = np.clip(self.state, -10, 10)
ob = self.state # observation
reward = get_reward(self.state) # reward
done = False # never ending
info = {} # empty dictionary
return ob, reward, done, info
def reset(self):
# Re-initialize state
self.state = self.observation_space.sample()
return self.state
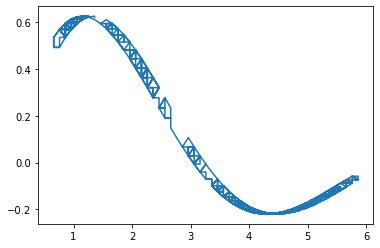
An agent can interact with the environment iteratively.
[6]:
env = MyEnv()
ob = env.reset()
ob_log = list()
reward_log = list()
for i in range(1000):
action = env.action_space.sample() # A random agent
ob, reward, done, info = env.step(action)
ob_log.append(ob)
reward_log.append(reward)
plt.plot(ob_log, reward_log)
[6]:
[<matplotlib.lines.Line2D at 0x11a378150>]
Trial-based Neurogym Tasks
Many neuroscience and cognitive science tasks have trial structure. neurogym.TrialEnv provides a class for common trial-based tasks. Its main difference from gym.Env is the _new_trial() method that generates abstract information about a new trial, and optionally, the observation and ground-truth output. Additionally, users provide a _step() method instead of step().
The _new_trial() method takes any key-word arguments (**kwargs), and outputs a dictionary trial containing relevant information about this trial. This dictionary is accesible during _step as self.trial.
Here we define a simple task where the agent needs to make a binary decision on every trial based on its observation. Each trial is only one time step.
[7]:
import neurogym as ngym
from neurogym import TrialEnv
class MyTrialEnv(TrialEnv):
def __init__(self):
super().__init__()
self.observation_space = gym.spaces.Box(low=-1., high=1., shape=(1,))
self.action_space = gym.spaces.Discrete(2)
self.next_ob = np.random.uniform(-1, 1, size=(1,))
def _new_trial(self):
ob = self.next_ob # observation previously computed
# Sample observation for the next trial
self.next_ob = np.random.uniform(-1, 1, size=(1,))
trial = dict()
# Ground-truth is 1 if ob > 0, else 0
trial['ground_truth'] = (ob > 0) * 1.0
return trial
def _step(self, action):
ob = self.next_ob
# If action equals to ground_truth, reward=1, otherwise 0
reward = (action == self.trial['ground_truth']) * 1.0
done = False
info = {'new_trial': True}
return ob, reward, done, info
[8]:
env = MyTrialEnv()
ob = env.reset()
print('Trial', 0)
print('Received observation', ob)
for i in range(5):
action = env.action_space.sample() # A random agent
print('Selected action', action)
ob, reward, done, info = env.step(action)
print('Received reward', reward)
print('Trial', i+1)
print('Received observation', ob)
Trial 0
Received observation [0.45315209]
Selected action 0
Received reward [0.]
Trial 1
Received observation [0.418608]
Selected action 0
Received reward [0.]
Trial 2
Received observation [-0.30473682]
Selected action 1
Received reward [0.]
Trial 3
Received observation [0.94499442]
Selected action 1
Received reward [1.]
Trial 4
Received observation [-0.90813549]
Selected action 1
Received reward [0.]
Trial 5
Received observation [0.51512945]
Including time, period, and observation in trial-based tasks
Most neuroscience and cognitive science tasks follow additional temporal structures that are incorporated into neurogym.TrialEnv. These tasks typically 1. Are described in real time instead of discrete time steps. For example, the task can last 3 seconds. 2. Contain multiple time periods in each trial, such as a stimulus period and a response period.
To include these features, neurogym tasks typically support setting the time length of each step in dt (in ms), and the time length of each time period in timing.
For example, consider the following binary decision-making task with a 500ms stimulus period, followed by a 500ms decision period. The periods are added to each trial through self.add_period() in self._new_trial(). During _step(), you can check which period the task is currently in with self.in_period(period_name).
[9]:
class MyDecisionEnv(TrialEnv):
def __init__(self, dt=100, timing=None):
super().__init__(dt=dt) # dt is passed to base task
# Setting default task timing
self.timing = {'stimulus': 500, 'decision': 500}
# Update timing if provided externally
if timing:
self.timing.update(timing)
self.observation_space = gym.spaces.Box(low=-1., high=1., shape=(1,))
self.action_space = gym.spaces.Discrete(2)
def _new_trial(self):
# Setting time periods for this trial
periods = ['stimulus', 'decision']
# Will add stimulus and decision periods sequentially using self.timing info
self.add_period(periods)
# Sample observation for the next trial
stimulus = np.random.uniform(-1, 1, size=(1,))
trial = dict()
trial['stimulus'] = stimulus
# Ground-truth is 1 if stimulus > 0, else 0
trial['ground_truth'] = (stimulus > 0) * 1.0
return trial
def _step(self, action):
# Check if the current time step is in stimulus period
if self.in_period('stimulus'):
ob = np.array([self.trial['stimulus']])
reward = 0. # no reward
else:
ob = np.array([0.]) # no observation
# If action equals to ground_truth, reward=1, otherwise 0
reward = (action == self.trial['ground_truth']) * 1.0
done = False
# By default, the trial is not ended
info = {'new_trial': False}
return ob, reward, done, info
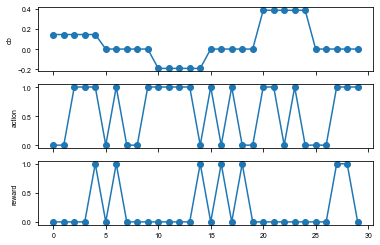
Running the environment with a random agent and plotting the agent’s observation, action, and rewards
[10]:
# Logging
log = {'ob': [], 'action': [], 'reward': []}
env = MyDecisionEnv(dt=100)
ob = env.reset()
log['ob'].append(ob)
for i in range(30):
action = env.action_space.sample() # A random agent
ob, reward, done, info = env.step(action)
log['action'].append(action)
log['ob'].append(ob)
log['reward'].append(reward)
log['ob'] = log['ob'][:-1] # exclude last observation
# Visualize
f, axes = plt.subplots(3, 1, sharex=True)
for ax, key in zip(axes, ['ob', 'action', 'reward']):
ax.plot(log[key], 'o-')
ax.set_ylabel(key)
Setting observation and ground-truth at the beginning of each trial
In many tasks, the observation and ground-truth are pre-determined for each trial, and can be set in self._new_trial(). The generated observation and ground-truth can then be used as inputs and targets for supervised learning.
Observation and ground_truth can be set in self._new_trial() with the self.add_ob() and self.set_groundtruth methods. Users can specify the period and location of the observation using their names. For example, self.add_ob(1, period='stimulus', where='fixation').
This allows the users to access the observation and groundtruth of the entire trial with self.ob and self.gt, and access their values with self.ob_now and self.gt_now.
[11]:
class MyDecisionEnv(TrialEnv):
def __init__(self, dt=100, timing=None):
super().__init__(dt=dt) # dt is passed to base task
# Setting default task timing
self.timing = {'stimulus': 500, 'decision': 500}
# Update timing if provided externally
if timing:
self.timing.update(timing)
# Here we use ngym.spaces, which allows setting name of each dimension
name = {'fixation': 0, 'stimulus': 1}
self.observation_space = ngym.spaces.Box(
low=-1., high=1., shape=(2,), name=name)
name = {'fixation': 0, 'choice': [1, 2]}
self.action_space = ngym.spaces.Discrete(3, name=name)
def _new_trial(self):
# Setting time periods for this trial
periods = ['stimulus', 'decision']
# Will add stimulus and decision periods sequentially using self.timing info
self.add_period(periods)
# Sample observation for the next trial
stimulus = np.random.uniform(-1, 1, size=(1,))
# Add value 1 to stimulus period at fixation location
self.add_ob(1, period='stimulus', where='fixation')
# Add value stimulus to stimulus period at stimulus location
self.add_ob(stimulus, period='stimulus', where='stimulus')
# Set ground_truth
groundtruth = int(stimulus > 0)
self.set_groundtruth(groundtruth, period='decision', where='choice')
trial = dict()
trial['stimulus'] = stimulus
trial['ground_truth'] = groundtruth
return trial
def _step(self, action):
# self.ob_now and self.gt_now correspond to
# current step observation and groundtruth
# If action equals to ground_truth, reward=1, otherwise 0
reward = (action == self.gt_now) * 1.0
done = False
# By default, the trial is not ended
info = {'new_trial': False}
return self.ob_now, reward, done, info
Sampling one trial. The trial observation and ground-truth can be used for supervised learning.
[12]:
env = MyDecisionEnv()
_ = env.reset()
trial = env.new_trial()
ob, gt = env.ob, env.gt
print('Trial information', trial)
print('Observation shape is (N_time, N_unit) =', ob.shape)
print('Groundtruth shape is (N_time,) =', gt.shape)
Trial information {'stimulus': array([-0.77779679]), 'ground_truth': 0}
Observation shape is (N_time, N_unit) = (10, 2)
Groundtruth shape is (N_time,) = (10,)
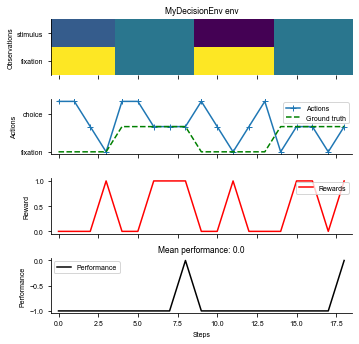
Visualizing the environment with a helper function.
[13]:
# Run the environment for 2 trials using a random agent.
fig = ngym.utils.plot_env(env, num_trials=2)
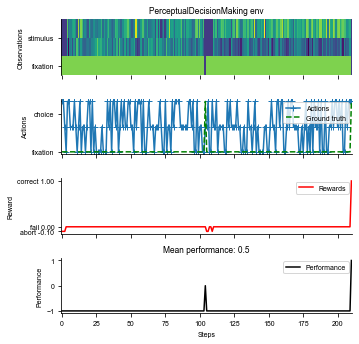
An example perceptual decision-making task
Using the above style, we can define a simple perceptual decision-making task (the PerceptualDecisionMaking task from neurogym).
[14]:
class PerceptualDecisionMaking(ngym.TrialEnv):
"""Two-alternative forced choice task in which the subject has to
integrate two stimuli to decide which one is higher on average.
Args:
stim_scale: Controls the difficulty of the experiment. (def: 1., float)
sigma: float, input noise level
dim_ring: int, dimension of ring input and output
"""
metadata = {
'paper_link': 'https://www.jneurosci.org/content/12/12/4745',
'paper_name': '''The analysis of visual motion: a comparison of
neuronal and psychophysical performance''',
'tags': ['perceptual', 'two-alternative', 'supervised']
}
def __init__(self, dt=100, rewards=None, timing=None, stim_scale=1.,
sigma=1.0, dim_ring=2):
super().__init__(dt=dt)
# The strength of evidence, modulated by stim_scale
self.cohs = np.array([0, 6.4, 12.8, 25.6, 51.2]) * stim_scale
self.sigma = sigma / np.sqrt(self.dt) # Input noise
# Rewards
self.rewards = {'abort': -0.1, 'correct': +1., 'fail': 0.}
if rewards:
self.rewards.update(rewards)
self.timing = {
'fixation': 100,
'stimulus': 2000,
'delay': 0,
'decision': 100}
if timing:
self.timing.update(timing)
self.abort = False
self.theta = np.linspace(0, 2*np.pi, dim_ring+1)[:-1]
self.choices = np.arange(dim_ring)
name = {'fixation': 0, 'stimulus': range(1, dim_ring+1)}
self.observation_space = ngym.spaces.Box(
-np.inf, np.inf, shape=(1+dim_ring,), dtype=np.float32, name=name)
name = {'fixation': 0, 'choice': range(1, dim_ring+1)}
self.action_space = ngym.spaces.Discrete(1+dim_ring, name=name)
def _new_trial(self, **kwargs):
# Trial info
trial = {
'ground_truth': self.rng.choice(self.choices),
'coh': self.rng.choice(self.cohs),
}
trial.update(kwargs)
coh = trial['coh']
ground_truth = trial['ground_truth']
stim_theta = self.theta[ground_truth]
# Periods
self.add_period(['fixation', 'stimulus', 'delay', 'decision'])
# Observations
self.add_ob(1, period=['fixation', 'stimulus', 'delay'], where='fixation')
stim = np.cos(self.theta - stim_theta) * (coh/200) + 0.5
self.add_ob(stim, 'stimulus', where='stimulus')
self.add_randn(0, self.sigma, 'stimulus', where='stimulus')
# Ground truth
self.set_groundtruth(ground_truth, period='decision', where='choice')
return trial
def _step(self, action):
new_trial = False
# rewards
reward = 0
gt = self.gt_now
# observations
if self.in_period('fixation'):
if action != 0: # action = 0 means fixating
new_trial = self.abort
reward += self.rewards['abort']
elif self.in_period('decision'):
if action != 0:
new_trial = True
if action == gt:
reward += self.rewards['correct']
self.performance = 1
else:
reward += self.rewards['fail']
return self.ob_now, reward, False, {'new_trial': new_trial, 'gt': gt}
[15]:
env = PerceptualDecisionMaking(dt=20)
fig = ngym.utils.plot_env(env, num_trials=2)